





SD700 Seria Wysokowydajnych Servo System
- Pasmo odpowiedzi pętli sprzężenia prędkościowego do 3 KHz
- Zastosowany 23-bitowy enkoder absolutny z szybkością komunikacji 2.5Mpps
- Pewne sterowanie zapewnia płynną pracę, szeroko stosowany w manipulatorach
- Umożliwia wielostopniowe wykluczenie częstotliwości rezonansowych obiektu.
Przegląd wysokowydajnego serwomechanizmu serii SD700
Serwonapędy serii VEICHI SD700 to produkty o wysokiej wydajności, niezawodności, wysokiej jakości i opłacalności, które mogą znaleźć zastosowanie w różnorodnych środowiskach przemysłowych i mogą pracować z krytycznymi aplikacjami systemowymi oraz zapewniają idealne połączenie serwomechanizmu i programu.
SD700 – to wysokowydajne serwo ogólnego przeznaczenia. Jest to połączenie wyrafinowania i prostoty

1. Pasmo odpowiedzi pętli sprzężenia prędkościowego do 3 KHz.
2. Zastosowany 23-bitowy enkoder absolutny z szybkością komunikacji 2.5Mpps.
3. Automatyczna kalkulacja parametrów regulatora PID przy podaniu pasmo odpowiedzi pętli sprzężenia.
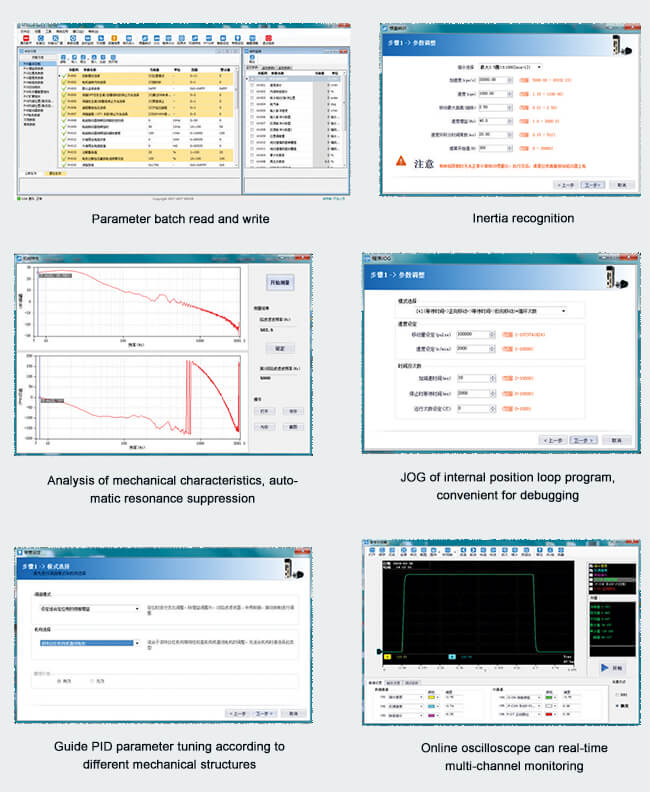
4. Proste w użyciu oprogramowanie wspierające sterowanie i wielokanałowy monitoring.
5. Automatyczna identyfikacja parametrów mechanicznych obiektu.
6. Obsługuje wielofunkcyjne systemy eliminacji rezonansu.
7. Nowatorskie algorytmy sterowania zapewniają płynną pracę w zakresie do 30 krotnej zmiany bezwładności.
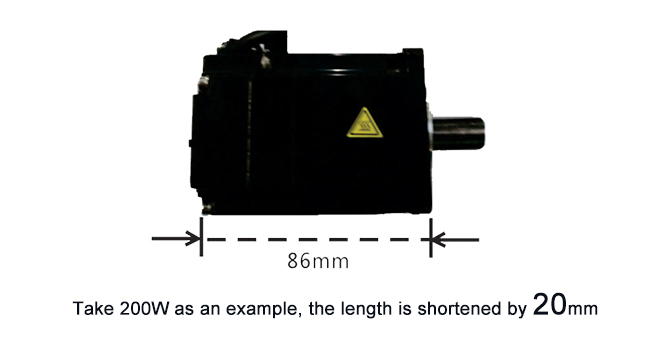
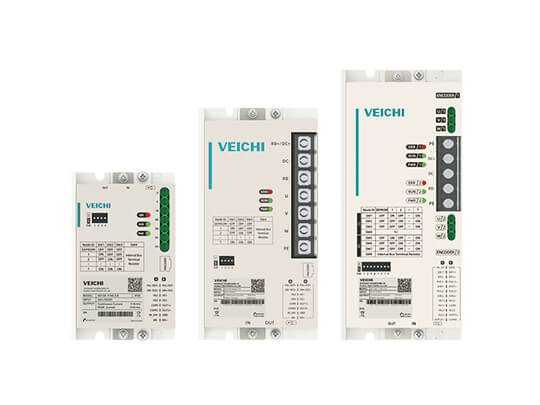
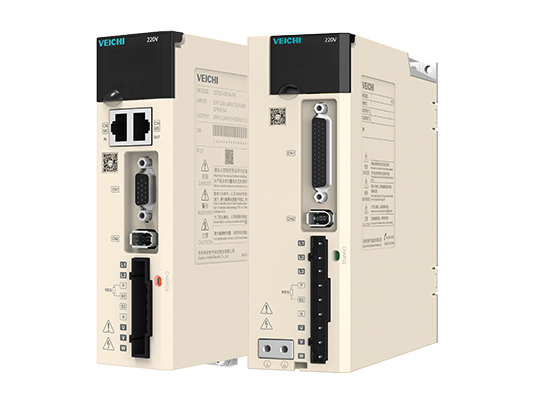
8. Nowy kompaktowy wygląd i wykonanie zapewniający oszczędne wykorzystanie miejsca.
3kHz pasmo odpowiedzi pętli prędkościowej
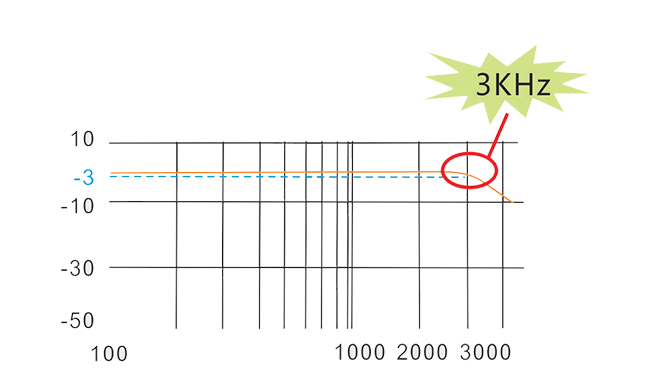
Dzięki unikalnemu algorytmowi pętli prądowej skutecznie zwiększa się szerokość pasma pętli prędkości, a czas ustawiania ulega znacznemu skróceniu. Najszybszy czas odpowiedzi może osiągnąć 1ms.
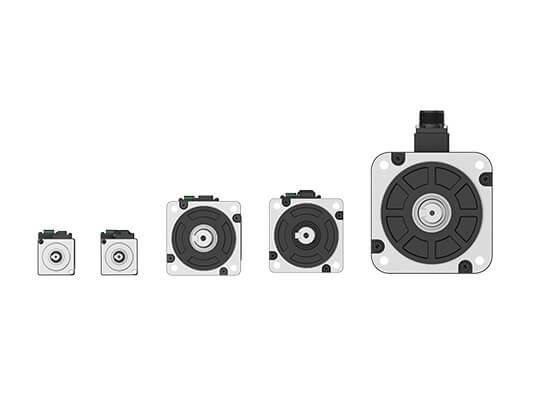
23-Bit enkoder absolutny
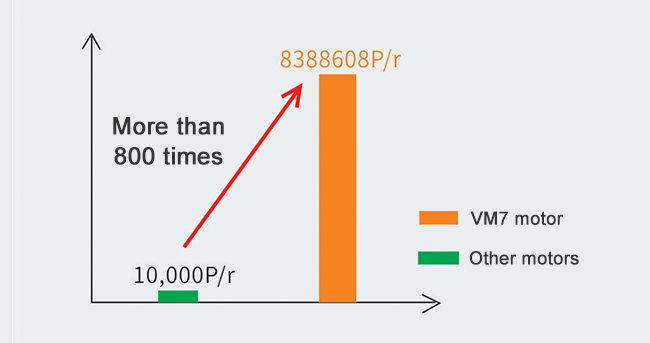
1. Standardowy 23-bitowy wieloobrotowy enkoder absolutny, jednoobrotowy do 8388608 impulsów, prędkość komunikacji do 2.5Mpps.
2. Pozycjonowanie jest precyzyjniejsze, niskie prędkości są bardziej stabilne i pozcja nie jest gubiona przy wyłączeniu zasilania.
Pewne sterowanie
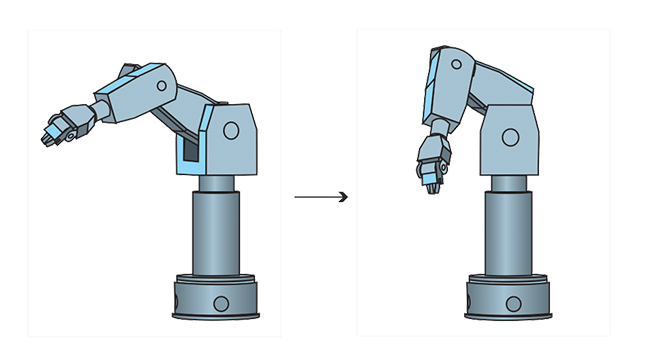
1. Przyjęto nowy algorytm teorii sterowania, aby zdać sobie sprawę, że nawet jeśli moment bezwładności obciążenia zmieni się w ciągu 30 razy podczas ruchu, nie ma potrzeby ustawiania parametrów urządzenia podrzędnego, aby zapewnić płynną pracę.
2. Sterownik jest gotowy do pracy bezpośrednio po zainstalowaniu.
Obsługa pełnej pętli sprzężenia zwrotnego
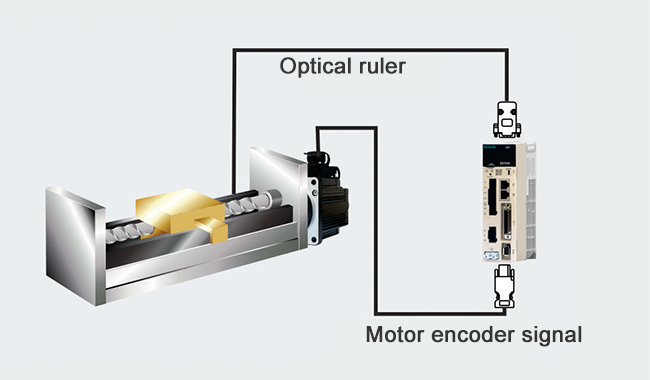
Tryb pełnej pętli sprzężenia zwrotnego obsługuje dodatkowy enkoder lub liniał, co zmniejsza błędy spowodowane luzami przekładni i poprawia dokładność pozycjonowania. Wszystkie modele są wyposażone w tę funkcję.
Funkcja kontroli wibracji o niskiej częstotliwości
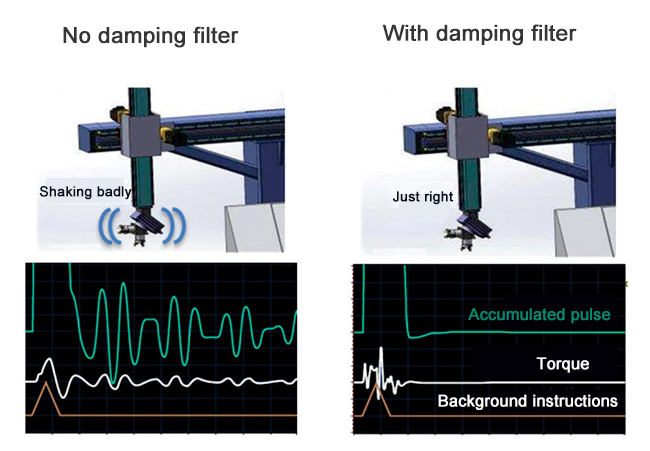
Filtr tłumiący można ustawić za pomocą oprogramowania komputera PC, co może skutecznie wyeliminować częstotliwość wibracji, znacznie zmniejszyć wibracje (drgania) wału podczas zatrzymywania i może skutecznie tłumić wibracje o częstotliwości 0 ~ 100 Hz. Ta funkcja jest powszechnie stosowana przy sterowaniu robotów do formowania wtryskowego lub układarek.
Automatyczne ustawienie filtra pasmowego
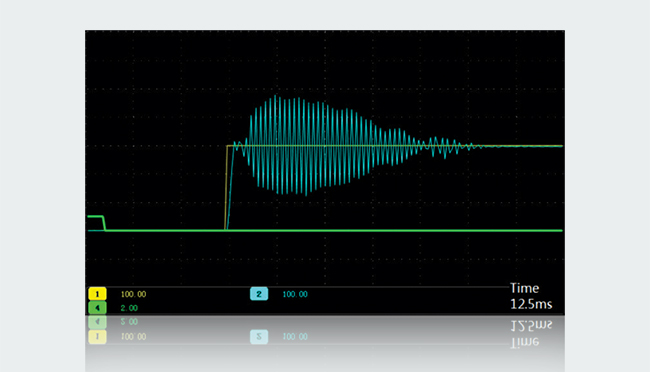
1. Nie ma potrzeby przeprowadzania skomplikowanych pomiarów i analiz częstotliwości drgań, filtr pasmowy może szybko przeszukać i automatycznie ustawić się podczas procesu dostrajania parametrów za pomocą funkcji regulacji prze zmianę pojedynczego parametru z komputera PC.
2. Prosty i łatwy w obsłudze i szybki algorytm, którego czas reakcji nie przekracza 70ms, może znacznie zmniejszyć hałas i wibracje spowodowane rezonansem mechanicznym sprzętu. Funkcja ta jest szeroko stosowana w obrabiarkach.
Inteligentne ustawianie
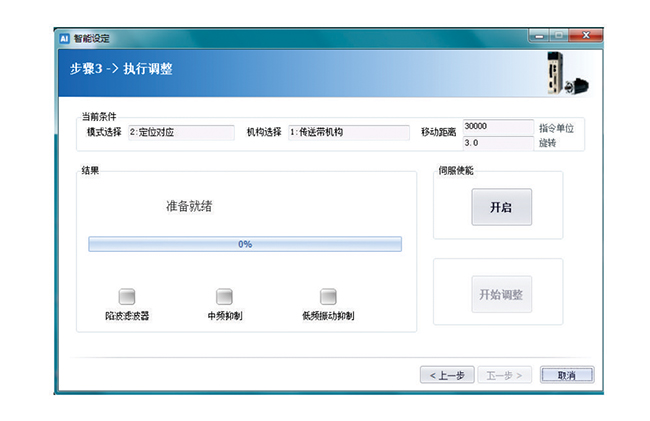
Automatyczna regulacja parametrów jest prosta i łatwa w użyciu. Zapewnia wiele trybów regulacji, które można dostosować do różnych struktur mechanicznych i charakterystyk procesu, dzięki czemu maszyna może szybko i pewnie osiągać oczekiwany stan.
Wspierane funkcje magistrali komunikacyjnej

Wspiera RS-485, EtherCAT, CANopen, MECHA-METROLINK, MECHATROLINK, i pozostałe znane magistrale.
Znaczna redukcja pulsacji momentu oraz bardziej stabilna praca przy niskich prędkościach obrotowych
Przyjęcie 10-stopniowego stojana i 12-szczelinową konstrukcję rotora oraz dzięki specjalnej konstrukcji obwodu magnetycznego efekt zazębienia jest skutecznie tłumiony, a tętnienia momentu obrotowego znacznie zmniejszone, zapewniając w ten sposób płynniejszą pracę silnika przy stałej i niskiej prędkości.
Oprogramowanie wspierające
1. Nie wymaga instalacji
2. Komunikacja USB pomiędzy serwowzmacniaczem a PC, łatwe w użyciu
Wysokowydajny serwo system SD700 Video
Zastosowania przemysłowe dla wysokowydajnych serwomechanizmów serii SD700
Applications:Electronic manufacturing equipment, numerical control equipment, packaging machinery, printing machinery, textile machinery, plastic machinery and glass equipment, testing equipment, etc.
Specyfikacja
| Zakres mocy | 0.1kW - 55kW, na życzenie do 250kW |
|---|
| Typ sterowania | IGBT, sterowanie PWM przy sinusoidalnym prądzie silnika |
|---|
| Różne silniki wirnikowe |
Enkodery z komunikacją szeregową: 17-bit, 20-bit lub 24-bit (enkoder absolutny) Enkodery impulsowe: enkoder liniowy Resolver |
|---|
| Temperatura otoczenia | Temperatura: -5℃-55℃ (obniżona wielkość parametrów przy 55℃-60℃) |
|---|---|
| Temperatura magazynowania | -20℃~85℃ |
| Wilgotność otoczenia | mniej niż 95% RH (bez zamarznięcia i kondensatu) |
| Wilgotność magazynowania | mniej niż 95% RH (bez zamarznięcia i kondensatu) |
| Odporność na wibracje | 4.9m/s² |
| Odporność na uderzanie | 19.6m/s² |
| Stopień bezpieczeństwa | IP20 |
| Otoczenie |
Brak gazów żrących i łatwopalnych Bez rozprysków wody, oleju i środków farmaceutycznych Stosowany w środowisku o mniejszym zapyleniu, soli i proszkach metali |
| Miejsce pracy | mniej niż 1000m (przy zredukowanych parametrach 1000-2000m) |
| Pozostałe |
Brak zakłóceń elektryczności statycznej, brak silnego pola elektrycznego, brak silnego pola magnetycznego, brak promieniowania itp. |
| Obowiązujące standardy |
EN 61800-5-1:2007 EN 61800-3:2004/A1:2012 |
|---|
| Typ instalacji |
Typ montażu na podstawie: wszystkie modele Typ montażu na półce: wszystkie modele |
|---|
| Kontrola prędkości - zakres | 1:6000 (dolna granica zakresu regulacji prędkości to wartość w warunkach pracy ciągłej przy obciążeniu momentem znamionowym) |
|---|---|
| Współczynnik oscylacji prędkości |
Mniej niż ± 0,01% prędkości znamionowej (przy wahaniu obciążenia: 0% -100%) 0% prędkości znamionowej (przy zmianie ±10% napięcia znamionowego) Poniżej ± 0,1% prędkości znamionowej (przy wahaniu temperatury: 25 ± 25°C) |
| Dokładność sterowania momentem | ±1% |
| Ustawianie czasu miękkiego startu | 0~10s (czas przyspieszania i czas hamowania ustawiany oddzielnie) |
|---|
| RS485 |
W przypadku korzystania z portu RS485 N maks. = 127 stacji Ustawienie pozycji osi: poprzez ustawienie parametrów |
|---|---|
| USB | Komputer PC, standardowa łącze USB1.1 (12Mpps) |
| Funkcje wyświetlania |
Wskaźnik postępu ładowania |
|---|
| Funkcje panelu operatorskiego | Przycisk - 4szt |
|---|
| Wyjście impulsowe z dzielnika enkodera |
Faza A, Faza B, Faza C: wyjście wzmacniacza liniowego może być dowolnie ustawiane |
|---|---|
| Sekwencja sygnałów wejściowych |
Wejście nieprogramowalne: zakres napięć wejściowych: DC 5V±5% Wejście nieprogramowalne: 1 punkt Wejście nieprogramowalne: enkoder absolutny |
| Sekwencja sygnałów wejściowych |
Programowalny sygnał wejściowy: Zakres napięcia roboczego: DC24V±20% Programowalny sygnał wejściowy: Wejścia: 9 punktów Programowalny sygnał wejściowy: Przełączanie typu NPN/PNP Programowalny sygnał wejściowy: Sygnał wejściowy Programowalny sygnał wejściowy: Serwo WŁ. (/S-ON) Programowalny sygnał wejściowy: tryb P/P-CON Programowalny sygnał wejściowy: sygnał powrotu do położenia początkowego (/DEC) Programowalny sygnał wejściowy: zakaz jazdy do przodu (P-OT) i zakaz jazdy do tyłu (N-OT) Programowalny sygnał wejściowy: Reset alarmu (/ALM-RST) Programowalny sygnał wejściowy: zewnętrzne ograniczenie momentu w przód (/P-CL) i zewnętrzne ograniczenie momentu w tył (/N-CL) Programowalny sygnał wejściowy: sygnał wyboru kierunku obrotu prędkości (/SPD-D). Programowalny sygnał wejściowy: Przełącznik trybu sterowania (/C-SEL) Programowalny sygnał wejściowy: ustalanie pozycji zerowej (/ZCLAMP) Programowalny sygnał wejściowy: Blokada impulsu poleceń (/INHIBIT) Programowalny sygnał wejściowy: Sygnał wejściowy wykrywania bieguna magnetycznego (/P-DET). Programowalny sygnał wejściowy: Przełączanie wzmocnienia (/G-SEL) Programowalny sygnał wejściowy: Przełącznik obejścia sygnału wejściowego impulsu poleceń (/PSEL) Programowalny sygnał wejściowy: sygnał wejściowy SEN (/SEN). Programowalny sygnał wejściowy: przypisywane sygnały i zmienna logika dodatnia/ujemna |
| Sekwencja sygnałów wyjściowych |
Wyjścia nieprogramowalne: zakres napięcia roboczego: DC5V ~ 30V Wyjście nieprogramowalne: 1 punkt Wyjścia nieprogramowalne: alarm napędu (ALM) |
| Sekwencja sygnałów wyjściowych |
Przypisywalny sygnał wyjściowy: Zakres napięcia roboczego: DC5V~30V Przypisywany sygnał wyjściowy: Punkty wyjściowe: 3 punkty Przypisywalny sygnał wyjściowy: Wyjścia z izolacją optoelektroniczną Przypisywany sygnał wyjściowy: Zakończono pozycjonowanie (/COIN) Przypisywalny sygnał wyjściowy: Potwierdzenie działania (/TGON) Przypisywany sygnał wyjściowy: Gotowość serwa (/S-RDY) Przypisywany sygnał wyjściowy: Wykrywanie ograniczenia momentu obrotowego (/CLT) Przypisywalny sygnał wyjściowy: Kontrola ograniczenia prędkości (/VLT) Przypisywany sygnał wyjściowy: Hamulce (/BK) Przypisywany sygnał wyjściowy: Ostrzeżenie (/WARN) Przypisywalny sygnał wyjściowy: przypisywane sygnały i zmienna logika dodatnia/ujemna |
| Hamulec dynamiczny | Działa przy wyłączonym zasilaniu obwodu głównego, podczas sygnalizacji alarmu i przy przekroczeniu zakresu (OT) |
|---|
| Regeneracja energii | Funkcja wbudowana |
|---|
| Przekroczenie zakresu (OT) Zabezpieczenie | Zatrzymanie hamulcem dynamicznym (DB), zatrzymanie zwalnianiem lub zatrzymanie wybiegiem podczas działania wejścia P-OT lub N-OT |
|---|
| Funkcje zabezpieczeń | Przekroczenie prądu, przekroczenie napięcia, zbyt niskie napięcie, przeciążenie, błąd regeneracji, itp. |
|---|
| Możliwości | Regulacja wzmocnienia, rejestracja alarmów, praca w trybie JOG itp. |
|---|
| Wejście | STO: podstawowy sygnał wyłączenia bloku mocy |
|---|
| Sterowanie pozycją | Kompensacja sprzężenia do przodu: 0% ~ 100% |
|---|---|
| Sterowanie pozycją | Zasięg ustawianej pozycji: 0~1073741824 |
| Sterowanie pozycją |
Sygnały sterujące: sekwencja wejść, sterowanie impulsowe, sekwencja impulsów CW+CCW, wejściowe sygnały dwufazowe Sygnały sterujące: Format wejściowy: Wzmacniacze liniowe lub otwarty kolektor Sygnały sterujące: Maksymalna częstotliwość wejściowa: wejścia + sekwencja impulsów, sekwencja impulsów CW + CCW: 4Mpps Sygnały sterujące: Maksymalna częstotliwość wejściowa: sygnały różnicowo-fazowe 90°, impuls dwufazowy: 1 Mpps Maksymalna częstotliwość wejściowa: Otwarty kolektor Sygnały sterujące: Maksymalna częstotliwość wejściowa: wejścia + sekwencja impulsów, sekwencja impulsów CW + CCW: 200 Kpps Sygnały sterujące: Maksymalna częstotliwość wejściowa: sygnały różnicowo-fazowe 90°, impuls dwufazowy: 200 Kpps |
| Sterowanie prędkością |
0~10s (przyspieszanie i zwalnianie może być ustawiane niezależnie) |
| Sterowanie prędkością |
sygnał wejściowy: Napięcie sterujące: Maksymalne napięcie wejściowe: ±10 V (obrót silnika do przodu, gdy zadane jest napięcie dodatnie) sygnał wejściowy: Napięcie sterujące: Prędkość znamionowa przy 6V DC [ustawienie fabryczne] sygnał wejściowy: Napięcie sterujące: Zmienne ustawienie wzmocnienia wejściowego sygnał wejściowy: Rezystancja wejściowa: Około 14KΩ sygnał wejściowy: Parametr czasu pętli: 30μs |
| Sterowanie prędkością |
Wewnętrznie ustawiona kontrola prędkości: Wybór kierunku obrotu: Użyj sygnału sterującego P Wewnętrznie ustawiona kontrola prędkości: Wybór prędkości: Za pomocą wejścia sygnału zewnętrznego ograniczenia momentu obrotowego do przodu/do tyłu Wewnętrznie ustawiona kontrola prędkości: Wybór prędkości: Zatrzymanie lub zmiana na inny tryb sterowania |
| Sterowanie momentem |
Sygnał wejściowy: Napięcie sterujące: Maksymalne napięcie wejściowe: ±10 V (dodatnie obroty silnika, gdy zadane jest napięcie dodatnie) Sygnał wejściowy: Napięcie sterujące: Prędkość znamionowa przy 6 V DC [ustawienie fabryczne] Sygnał wejściowy: Napięcie sterujące: Zmienne ustawienie wzmocnienia wejściowego |
| Sterowanie momentem |
Sygnał wejściowy: Rezystancja wejściowa: Około 14 KΩ Sygnał wejściowy: Parametr czasu pętli: 16μs |
Pobieranie
| Nazwa pliku | Typ | Język | Format pliku | Data wydania | Pobierz |
|---|---|---|---|---|---|
| Introduction of Internet of Things | Catalog | English | 2018-02-04 | 1,0 MB | |
| CE (EMC) of SD700 Servo Drive | Certificate | English | 2018-07-06 | 282,2 KB | |
| Upper Computer Debugging Software V1.6.10 | Software | English | zip | 2022-01-27 | 32,2 MB |
| SD700 Series Servo Technical Manual V1.1 | Manual | English | 2022-04-21 | 9,1 MB | |
| CE (LVD) of SD700 Servo Drive | Certificate | English | 2018-07-06 | 282,0 KB | |
| SD700 Servo Drive Catalog V1.1 | Catalog | English | 2022-04-07 | 14,7 MB | |
| Solution for Machine Tool Industry | Catalog | English | 2019-04-17 | 10,0 MB | |
| SD700&710&780 Series Servo Soft V2.4-EN | Software | English | zip | 2023-03-15 | 51,8 MB |
| SD700 Servo Drive Manual V1.4 | Manual | English | 2020-10-20 | 5,0 MB | |
| SD700 Series Servo Soft V1.6-Turkey | Software | Turkish | 2019-09-20 | ||
| SD700 Series Servo 3D Files | CAD File | English | zip | 2021-02-03 | 25,2 MB |
| SD700 Servo Drive Catalog for Phone | Catalog | English | 2021-02-26 | 8,8 MB | |
| SD700 Series Servo ECAT V1.1 G | Manual | English | zip | 2021-03-09 | 9,7 KB |
| Servo Selection(A1.7) V1.2 | Software | English | zip | 2022-06-17 | 812,9 MB |
| SD700 Profinet xml V1.0 | Manual | English | zip | 2022-04-20 | 12,3 MB |
| SD700 Ethercat xml V1.0 | Manual | English | zip | 2022-05-17 | 3,9 MB |
| SD700 User Manual V1.0 | Manual | English | 2023-08-03 | 10,5 MB |



 Skontaktuj się z nami
Skontaktuj się z nami